|
Консультант по электроснабжению
Не нашли нужный онлайн-расчет по электроэнергетике? Свяжитесь с нами!
ИИ-агент "Онлайн Электрик"
ИИ-агент "Онлайн Электрик" подскажет как найти нужный онлайн расчет или базу данных на сайте "Онлайн Электрик".
ИИ-агент присутствует в правом-нижнем углу каждой страницы .
К расчету мощности электромагнитного компенсатора жесткостиГурова Е.Г., доцент каф. Электротехнических комплексовБатрутдинов С.Ф., Капитаненко В.Е., Кулекина А. В., маг-нты, Зоригт О., Вязовцев С.К., Ларин А.В. студенты каф. ЭТК Курбатов В.С. ведущий инженер ФГБОУ ВПО «НГТУ», ФГУП ПО «СЕВЕР»
Электромагнитный компенсатор жёсткости [1] предназначен для установки параллельно упругим элементам виброизолирующих подвесок с целью коррекции коэффициента жёсткости последних. Компенсатор представляет собой два встречно включенных электромагнита постоянного тока с раздельными магнитопроводами, закреплёнными на защищаемом основании. Общий якорь электромагнитов связан с вибрирующим объектом. Силовая характеристика компенсатора (зависимость тягового усилия от перемещения якоря) имеет падающий вид, то есть компенсатор имеет отрицательный коэффициент жёсткости.
В работе, посвященной электромагнитному компенсатору жесткости [3], было показано, что силовая характеристика электромагнитов в области неустойчивого равновесия близка к линейной. Однако характеристику нельзя линеаризовать, если размах колебаний вибрирующего объекта соизмерим с межполюсным расстоянием. Если увеличим расстояние между полюсами электромагнитов, то характеристику электромагнитного корректора жесткости можно будет считать линейной, и тогда габариты и потребляемая мощность электромагнитов будут значительными. Для случая нелинейной характеристики их габариты будут существенно меньше. 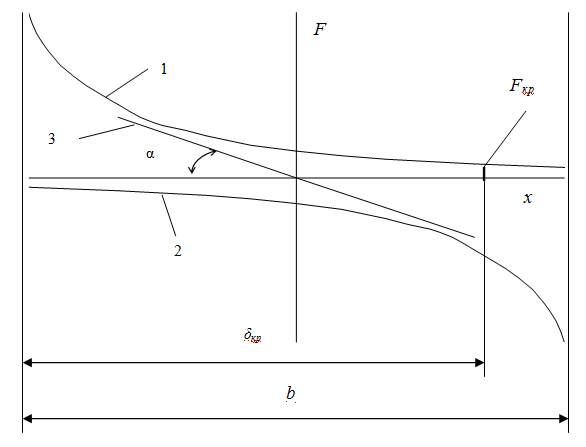
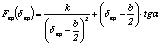
Рисунок 1 - Силовая характеристика электромагнитного компенсатора жесткости: 1 – тяговая характеристика 1-го электромагнита; 2 – тяговая характеристика 2-го электромагнита; 3 – суммарная тяговая хар-ка В [4] приведен расчет электромагнита, при помощи которого можно получить графическую зависимость мощности от величины критического зазора. Для этого расчета необходимо вывести зависимость наибольшей электромагнитной силы от перемещения якоря электромагнита, при условии постоянства жесткости силовой характеристики. Чтобы получить это выражение, будем считать, что суммарная тяговая характеристика, показанная на рисунке 1, линейна. Для определения зависимости критической силы электромагнита от критического зазора воспользуемся силовой характеристикой электромагнитного компенсатора жесткости, показанной на рисунке 1. Проведя несложные математические преобразования, получим:
δкр- критический зазор; b – расстояние между полюсами электромагнитов; tgα - жесткость компенсатора. Под критическим зазором понимается зазор, при котором электромагниту приходится развивать наибольшую работоспособность для преодоления соответствующей противодействующей силы. А соответствующую ему электромагнитную силу – критической силой. Выполнив расчеты мощности электромагнита для ряда значений межполюсного расстояния электромагнитов, получим зависимость (кривая 1), показанную на рисунке 2. 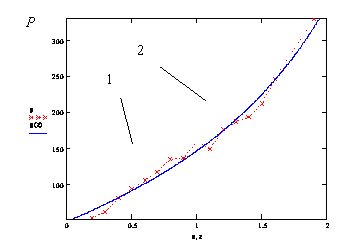
Рисунок 2 - График зависимости мощности электромагнитного компенсатора жесткости от межполюсного расстояния: 1 – расчетная кривая; 2 – аппроксимированная кривая Анализируя полученный график, можно отметить, что с уменьшением величины критического зазора в два раза, мощность тоже уменьшится почти в два раза, а при увеличении зазора, например, в полтора раза мощность увеличится в 1,3 раза. Для более четкого представления зависимости мощности электромагнитного компенсатора жесткости от межполюсного расстояния проведем аппроксимацию кривой 1, используя метод наименьших квадратов или метод регрессии [2]. В результате получим аппроксимированный график зависимости мощности электромагнитного компенсатора жесткости от межполюсного расстояния, показанный на рисунке 2. Опишем аппроксимированную кривую 2 уравнением, которое в итоге примет вид:
1. Гурова, Е. Г. Виброизолирующие подвески транспортных энергетических установок с нелинейными электромагнитными компенсаторами жесткости / Е. Г. Гурова. – 2012. - Издательство НГТУ: Новосибирск, 2012. - 156 c 2. Ершов, И.В. Система MathCad 2001 Professional в задачах математики [Текст]: учебное пособие для студентов ЭТФ / И.В. Ершов. - Новосибирск: Новосиб. гос. акад. вод. трансп., 2003. - 67с. 3. Гурова, Е.Г. Виброизолирующая подвеска судовой энергетической установки с нелинейной электромагнитным компенсатором жесткости: автореферат дис. канд. техн. наук/ Гурова Елена Геннадьевна. – Новосибирск, 2008. – 23 с. 4. Любчик, М.А. Расчет и проектирование электромагнитов постоянного и переменного тока [Текст]: / А.М.Любчик; под общ. ред. Б.Ф. Вашуры. - М.: Госэнергоиздат, 1959. - 224 с. Библиографическая ссылка на статью: Гурова Е.Г., Батрутдинов С.Ф., Капитаненко В.Е., Кулекина А. В., Зоригт О., Вязовцев С.К., Ларин А.В., Курбатов В.С. К расчету мощности электромагнитного компенсатора жесткости // Онлайн Электрик: Электроэнергетика. Новые технологии, 2012.–URL: /articles.php?id=53 (Дата обращения: 08.07.2026)
|
| Вход в систему |
| Восстановление пароля |
| Смените пароль |
| Регистрация нового пользователя |