|
Консультант по электроснабжению
Не нашли нужный онлайн-расчет по электроэнергетике? Свяжитесь с нами!
Бот Яша
Бот Яша подскажет как найти нужный онлайн расчет или базу данных на сайте "Онлайн Электрик".
Написать боту.
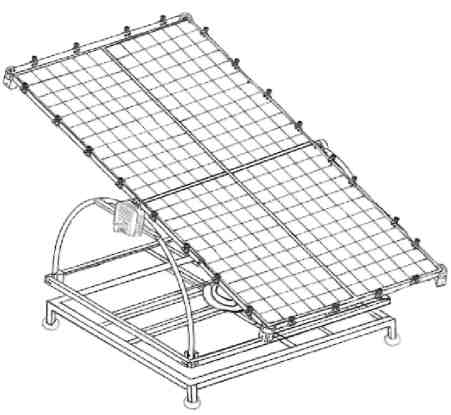
Автономная фотоэлектрическая энергетическая установкаМ.Х. Муродов,Б.Х. МуродовНаманганский инженерно-педагогический институт г. Наманган, Республика Узбекистан Приведены результаты проектирования автономной фотоэлектрической энергетической установки с максимальной выходной мощностью 1,5 кВт с экстремальным регулированием мощности солнечных батарей и их автоматическим слежением за Солнцем. Ключевые слова: Автономная фотоэлектрическая энергетическая установка, солнечная батарея, аккумуляторная батарея, энергетическая эффективность, экстремальное регулирование мощности, автоматическое слежение за Солнцем.. Создание высокоэффективных автономных фотоэлектрических энергетических установок (АФЭУ) в первую очередь определяется использованием источников тока (солнечных и аккумуляторных батарей) с улучшенными технико-экономическими показателями. Однако даже при самых совершенных источниках энергии, энергетическая установка может обладать невысокими энергетическими характеристиками из-за нерационального использования их возможностей. Поэтому, при проектировании высокоэффективных автономных фотоэлектрических энергетических установок, должна решаться задача как разработки (использования) солнечных батарей (СБ) с повышенным КПД и аккумуляторных батарей (АБ) с улучшенными техническими характеристиками, так и задача системного проектирования фотоэлектрических систем и энергетических установок с целью повышения их энергетической эффективности [1]. В статье [2] показано, что основными способами повышения энергетической эффективности АФЭУ являются реализация режима отбора мощности в оптимальной рабочей точке вольт-амперной характеристики солнечной батареи в течение всего срока эксплуатации (реализация режима экстремального регулирования мощности солнечных батарей) и реализация режима непрерывного (непрерывно-дискретного) автоматического слежения солнечных батарей за Солнцем. Одновременная реализация этих способов регулирования позволяет повысить энергетическую эффективность АФЭУ не менее чем на 30 %. Степень повышения энергетической эффективности зависит от широты местоположения, а также текущих условий эксплуатации энергетической установки (освещенности и температуры солнечных батарей). В Томском государственном университете систем управления и радиоэлектроники (ТУСУР) ведется разработка АФЭУ с одновременной реализацией экстремального регулирования мощности солнечных батарей и автоматического слежения солнечных батарей за Солнцем (максимальной выходной мощностью 1,5 кВт). На рис. 1 приведен эскиз разработанной двухкоординатной системы наведения солнечных батарей на Солнце.
Основные детали конструкции: рама с четырьмя фотоэлектрическими модулями КСМ-160 (КСМ-170 или КСМ-180, имеющие одинаковые размеры); подвижный каркас; неподвижный каркас; два редуктора; два шаговых двигателя типа ШД-5Д; два датчика положения Солнца, четыре конечных выключателя. Неподвижный каркас установки состоит из стальной сварной рамы, состоящей из четырех уголков и профильных трубчатых элементов с четырьмя угловыми опорами и одной центральной опоры, в которой установлен вращающийся вал. Вращение вала обеспечивается за счет шагового двигателя через червячный редуктор и цилиндрическую зубчатую передачу. Подвижный каркас установки состоит из стальной сварной рамы, с закрепленной на ней ведомой шестерней, которая связана с центральным валом нижнего опорного узла шпоночным соединением для обеспечения вращения установки вокруг вертикальной оси. На этом же каркасе закреплены две дуги, на которых установлена ось вращения рамы, которая через муфту и редуктор соединена с шаговым двигателем, обеспечивающим поворот рамы по углу места. В качестве силовых механизмов обеспечивающих поворот фотоэлектрической установки используются червячные редукторы с передаточными отношениями 1:250 (по азимуту) и 1:1000 (по углу места), что позволяет использовать шаговые двигатели с номинальным вращающим моментом нагрузки 0,1 Н•м. Червячные редукторы позволяют исключить самопроизвольное изменение положения установки под действием ветровой нагрузки. Ограничение предельных (заданных по техническому заданию) углов поворота АФЭУ по азимуту и углу места обеспечивается конечными выключателями, закрепленными на раме неподвижного каркаса установки и программным обеспечением контроллера наведения на Солнце. Функциональная схема автономной фотоэлектрической энергетической установки приведена на рис. 2, где СБ – солнечная батарея; КЗРАБ – контроллер заряда-разряда АБ; И – инвертор; АБ1, АБ2 – аккумуляторные батареи; М1, М2 – шаговые двигатели; Р1, Р2 – редукторы; ДШД1, ДШД2 – драйверы управления шаговыми двигателями; ДПС1, ДПС2 – датчики положения Солнца; КНС – контроллер наведения на Солнце; КВ1–КВ4 – конечные выключатели. В энергетической установке используется: инвертор с синусоидальным выходом типа TS 1500–224 (номинальная выходная мощность 1500 Вт) и два последовательно соединенных аккумулятора типа FIAMM 12SP 235 (номинальная емкость каждого 235 А•ч). Следящая система автоматического управления состоит из двух датчиков положения Солнца, контроллера наведения на Солнце, двух шаговых двигателей с редукторами, двух силовых драйверов шагового двигателя и четырех конечных выключателей. Используемый в установке датчик положения Солнца разработан и изготовлен в ТПУ и ОАО НИИ ПП (г. Томск) и состоит из трех одинаковых фотоэлементов, два из которых стоят наклонно друг к другу, а третий соединяет их снизу. Фотоэлементы датчика называют: правый, левый и тыловой. Контроллер наведения на Солнце состоит из микроконтроллера Atmega16, преобразователя постоянного напряжения, шести операционных усилителей, микросхемы, обеспечивающей связь по протоколу RS 485 с внешней ЭВМ. Микроконтроллер выдает на вход драйверов шагового двигателя следующие сигналы: направление вращения шаговых двигателей по координате Х (азимуту) (сигнал DIR1) и по координате Y (углу места) (сигнал DIR2), количество импульсов, которое необходимо отработать драйверами (шаговыми двигателями) по координате Х (сигнал СР1) и по координате Y (сигнал СР2).Контроллер наведения на Солнце принимает сигналы с четырех конечных выключателей (КВ1–КВ4): Х1, Y1 и Х2, Y2 – начальные и конечные положения рамы по координате Х и Y.

В контроллере реализованы два режима работы: режим ручного регулирования положения рамы от внешней ПЭВМ и режим автоматического слежения за Солнцем. В режиме ручного регулирования от внешней ПЭВМ любое положение рамы по обеим координатам передается в контроллер по протоколу RS 485. При этом перемещение возможно по азимуту на 360°, а по углу места 180°. Это отладочный режим. В режиме автоматического слежения за Солнцем осуществляется точное наведение рамы на Солнце, путем измерения токов в фотоэлементах датчиков положения Солнца и перемещения рамы с помощью шаговых электроприводов по обеим координатам. Если правый и левый фотоэлемент выдают одинаковый ток, то перемещать раму с СБ не требуется, а если есть отличие, то необходимо перемещение в таком направлении, чтобы скомпенсировать эту разницу по току. Если три фотоэлемента у датчика показывают одинаковый ток, то фото датчик (и соответственно СБ) находится в тени и перемещение рамы производить не требуется. Если тыловой фотоэлемент выдает самый больший ток, то Солнце светит с обратной стороны рамы. В этом случае необходимо развернуть раму в направлении Солнца. Указанные выше перемещения соответствует алгоритму, приведенному в таблице.
Таблица. Алгоритм наведения СБ на Солнце
Примечание: IA, ID иIB, IE - токи в правой и левой частях датчиков; IC, IF – в тыловой части датчиков.
Перемещения происходят дискретно через 3° по обеим координатам, пока не выровняются сигналы в обеих плоскостях в каждом фото датчике по обеим координатам. Допустимая погрешность (порог срабатывания) между сигналами в наклонных плоскостях фотоэлементов датчика, при которой необходимо проводить перемещение по координатам, составляет 5 % (эта величина может устанавливаться в контроллере). Введение порога срабатывания позволяет экономить энергию при перемещении рамы и предотвращать ненужный реверс в шаговых двигателях. На рис. 3 приведено рабочее окно программы управления контроллером наведения на Солнце в режимах отладки.

В моменты отсутствия перемещения шаговые двигатели не потребляют энергии. Для уменьшения рывков и качания при перемещении рамы в программном обеспечении контроллера заложен режим позиционирования, то есть в шаговом электроприводе идет ограничение по скорости и ускорению при перемещении рамы от одного положения к другому. Результаты экспериментальных исследований энергетики шаговых электроприводов на АФЭУ показали следующее: время перемещение по углу места (80°) составляет 56 с, а по азимуту (180°) 35 с при скорости вращения шаговых двигателей 200 об/мин. При этом выполняется половина суточного цикла перемещений на АФЭУ. Измеренная потребляемая мощность одного шагового двигателя ШД-5Д с силовым драйвером на установке составляет 50 Вт (мощность шагового двигателя ШД5Д по паспорту 36 Вт). Суммарная потребляемая энергия электроприводами на установке при перемещении по азимуту и углу места с начального положения и до максимального положении и возвращения до начального положения (суточный цикл) составляет 7100 Вт•с или 1,97 Вт•ч, что не превышает 1 % от суточного значения выработанной энергии. В драйвере ДШД используется микроконтроллер STM32F103. Обмотки шагового двигателя ШД-5Д соединены в звезду и подключены к трех-фазному мосту, который образован полевыми транзисторами. Драйвер ДШД задает величину минимального шага и амплитуду импульса тока в шаговом двигателе, осуществляет защиту от коротких замыканий в двигателе и выдает на контроллер наведения на Солнце сигналы готовности RDY1, RDY2 – готовность по координатам Х и Y. Минимальный шаг в двигателе можно задать 0,03 градуса. Контроллер заряда-разряда аккумуляторной батареи (КЗРАБ) реализует экстремальное регулирование мощности СБ, имеет незначительное энергопотребление и повышает эффективность использования солнечной батареи до 98,0…99,5 %. В контроллере применена схема понижающего преобразователя напряжения, которая представлена на рис. 4. Основным критерием, принятым при разработке схемы контроллера является достижение максимального КПД, т. е. обеспечение минимума потерь мощности. В результате теоретических расчетов и экспериментальных исследований определено, что оптимальная частота преобразования, позволяющая получить приемлемые массогабаритные показатели фильтров преобразователя при минимальных потерях находится в области 40…50 кГц.
 С учетом выбранной частоты применены силовой полевой транзистор IRFPS3810 и диод BYV32E. Управление зарядным устройством производится микроконтроллером (МК) Atmega128, совмещающим функции пользовательского интерфейса сформированием управляющего воздействия на силовой полевой транзистор VT. В работе контролера предусмотрено два режима работы. Первый, ручной режим - режим стабилизации напряжения СБ в фиксированной рабочей точке. Второй, автоматический режим - режим экстремального регулирования мощности (ЭРМ) солнечных батарей, в котором происходит поиск рабочей точки вольт-амперной характеристики с максимальной выходной мощностью СБ. Алгоритм работы обратной связи (ОС) показан на рис. 5. Перед включением зарядного устройства (КЗРАБ) производится тестовый опрос датчиков напряжения ДН1 и ДН2. Если напряжение холостого хода СБ меньше напряжения АБ запуск устройства блокируется. Другим условием блокировки запуска является полный заряд АБ, что определяется по напряжению АБ. В режиме ЭРМ опрашиваются датчики параметров СБ: датчик тока (ДТ1) и датчик напряжения (ДН1), рассчитывается выходная мощность СБ. Полученное измеренное значение входной мощности Р„ сравнивается со значением мощности РСБ измеренном до введения управляющего воздействия и согласно алгоритму принимается решение о направлении перемещения рабочей точки по вольт-ваттной характеристике (ВВХ). Если РСБЖ>РСБ от знак управляющего воздействия Ау не изменяется, что говорит о правильном направлении движения рабочей точки по ВВХ. Если происходит уменьшение мощности РСБЯШ<РСБО), то рабочая точка движется вниз по ВВХ, поэтому знак изменения напряжения СБ меняется на противоположный Δγ=–Δγ. При пренебрежении погрешностями измерения мощности СБ процесс поиска точки максимума мощности показан на рис. 6. При исходном положении рабочей точки ВВХ в точке А, измеряется соответствующая ей мощность СБ и условно принимается решение об увеличении напряжения СБ, т. е. рабочая точка согласно алгоритму перемещает рабочую точку в точку В, где измеряется новое значение
 мощность в точке В больше мощности в точке А, поэтому рабочая точка продолжает сдвигаться в прежнем направлении и попадает в точку С. В точке С мощность меньше, чем в точке В, поэтому происходит смена знака приращения напряжения СБ, рабочая точка перемещается обратно в точку В. Сравнение значений мощности в точках В и Сдает перемещение в прежнем направлении, соответственно рабочая точка перемещается в точку А, где сравнение мощностей точек А и В приводит к очередной смене направления движения рабочей точки, т. е. она попадает в точку В. Таким образом, после определения максимума мощности, положение рабочей точки колеблется в окрестности трех точек. Свойством алгоритма является постоянное движение рабочей точки, что необходимо для обнаружения смещения экстремума ВВХ и поиска его нового значения. В алгоритме присутствует пауза между введением управляющего воздействия и опросом измерительных датчиков, которая необходима для окончания переходных процессов вызванных управляющим воздействием и измерения установившегося значения мощности. Очевидно, что пауза определяет частоту управляющих воздействий и, соответственно время поиска экстремума мощности, т. е. быстродействие обратной связи контроллера. Поэтому фактором, ограничивающим быстродействие системы, является время переходных процессов в силовом преобразователе, определяемом инерционностью сглаживающих фильтров. Для оценки предельного допустимого быстродействия выше рассмотренной системы выполнено моделирование устройства в OrCAD 9.2 и произведена оценка переходных процессов при скачкообразном изменении относительной длительности импульса управления у. Установлено, что переходный процесс носит экспоненциальный характер с постоянной времени т=L/R АБ, где L - индуктивность выходного фильтрующего дросселя, R АБ -внутреннее сопротивление аккумулятора. Таким образом, элементом, определяющим время переходных процессов, является выходной дроссель. Поэтому при разработке программы между введением управляющего воздействия и измерением выходных параметров введена пауза длительностью более 10 мс.
Выводы
СПИСОК ЛИТЕРАТУРЫ
Библиографическая ссылка на статью: М.Х. Муродов,Б.Х. Муродов Автономная фотоэлектрическая энергетическая установка // Онлайн Электрик: Электроэнергетика. Новые технологии, 2016.–URL: /articles.php?id=160 (Дата обращения: 16.04.2024)
|
| Вход в систему |
| Восстановление пароля |
| Смените пароль |
| Регистрация нового пользователя |